The Creation of GOAT Racer One
Making Sim2Real reinforcement learning approachable and accessible
What It Is
GOAT RACER ONE is an accessible autonomous robotics platform designed to make Sim2Real reinforcement learning approachable. The project builds a fast, "not-a-toy" autonomous mobile robot (AMR) using common off-the-shelf parts, aiming to be understandable to non-robotics experts.
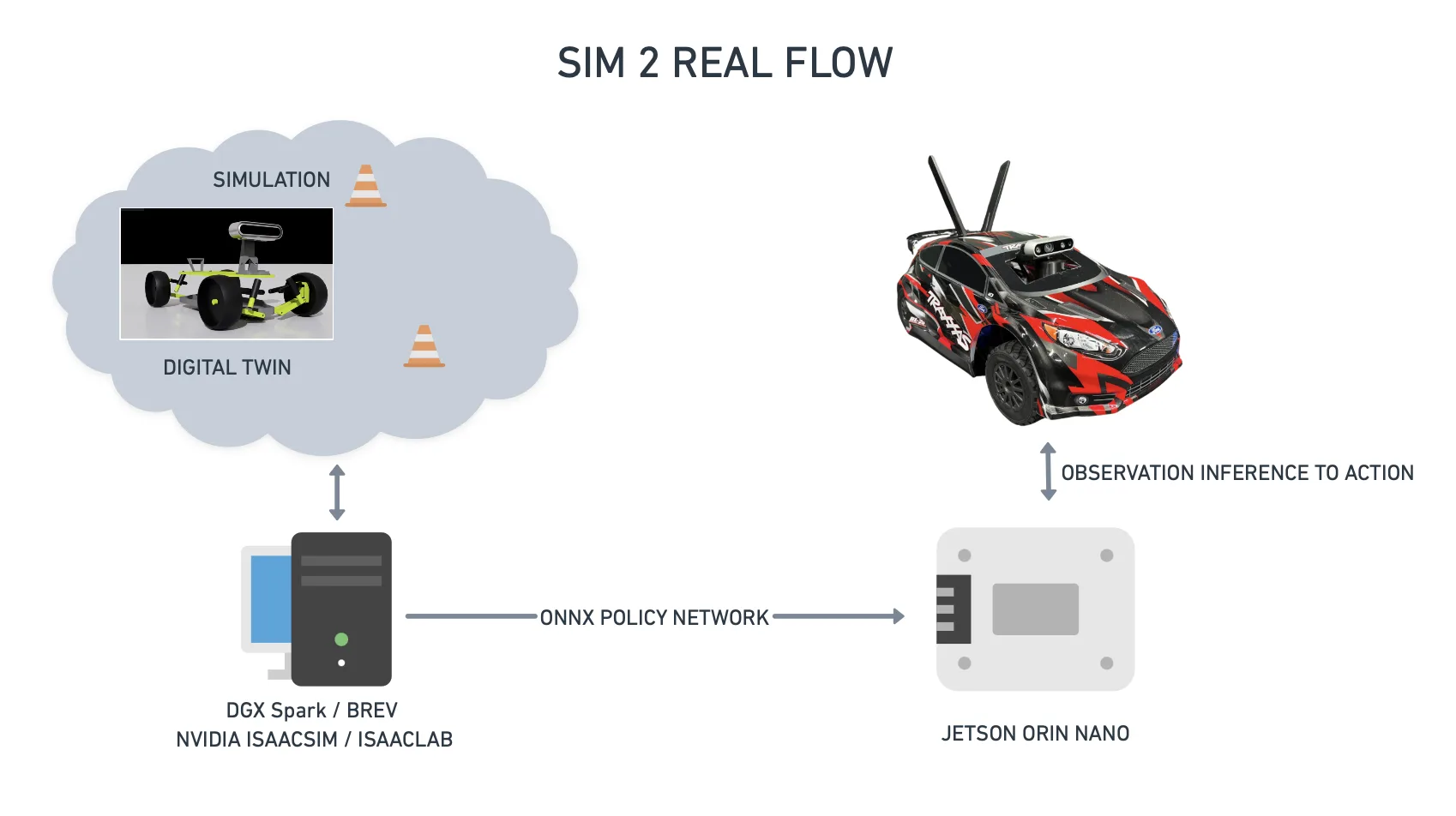
Its core promise is rapid iteration: develop driving behavior in NVIDIA IsaacSim/IsaacLab using a digital twin, export an ONNX policy, and deploy it to the physical robot within minutes via policy transfer.


Accessible Cost Point
Cost and accessibility are central to the platform's design, positioned below traditional research platforms while emphasizing higher on-board AI compute and real-time sensing to support demanding autonomy workloads.
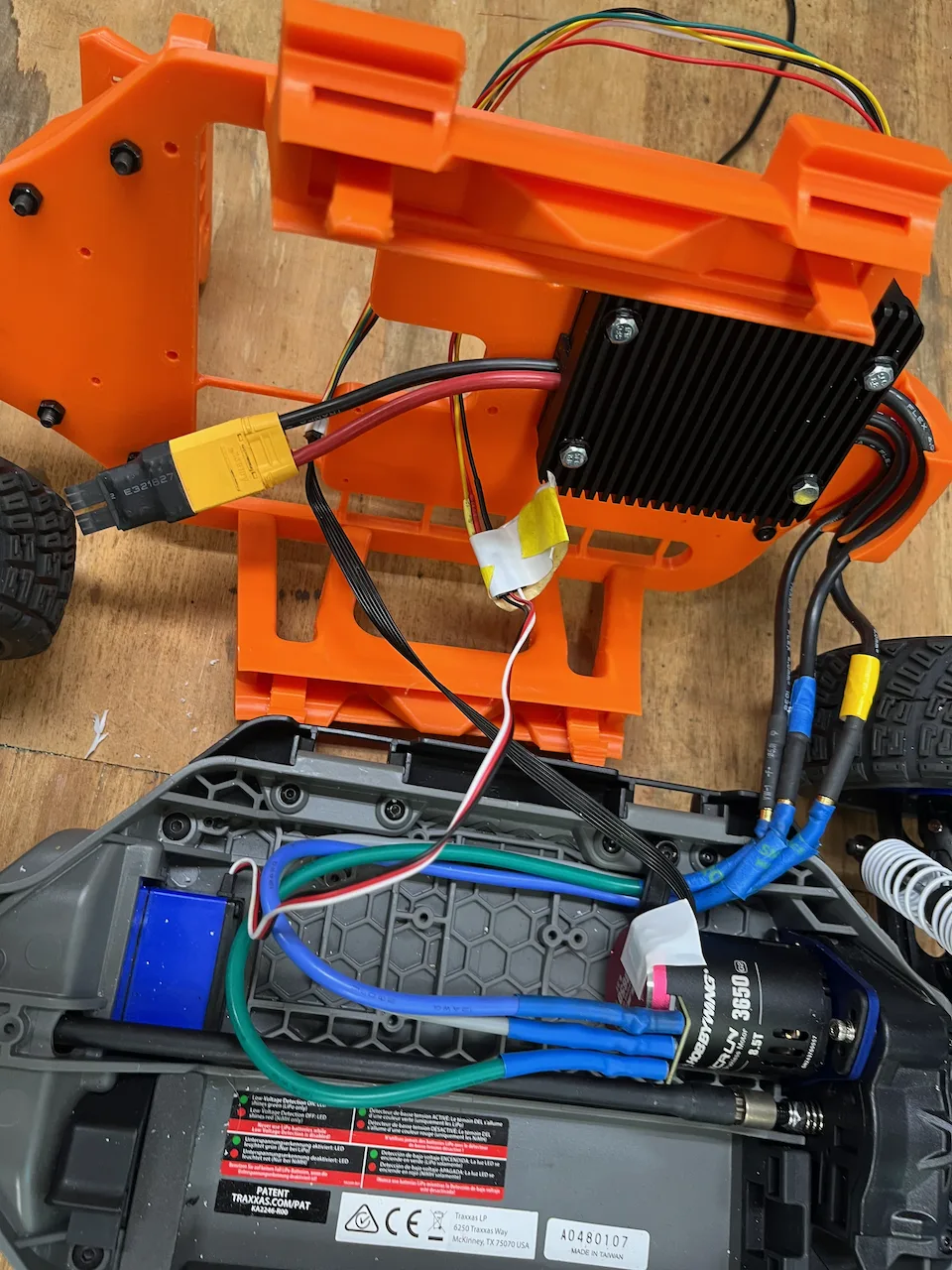
Hardware Foundation
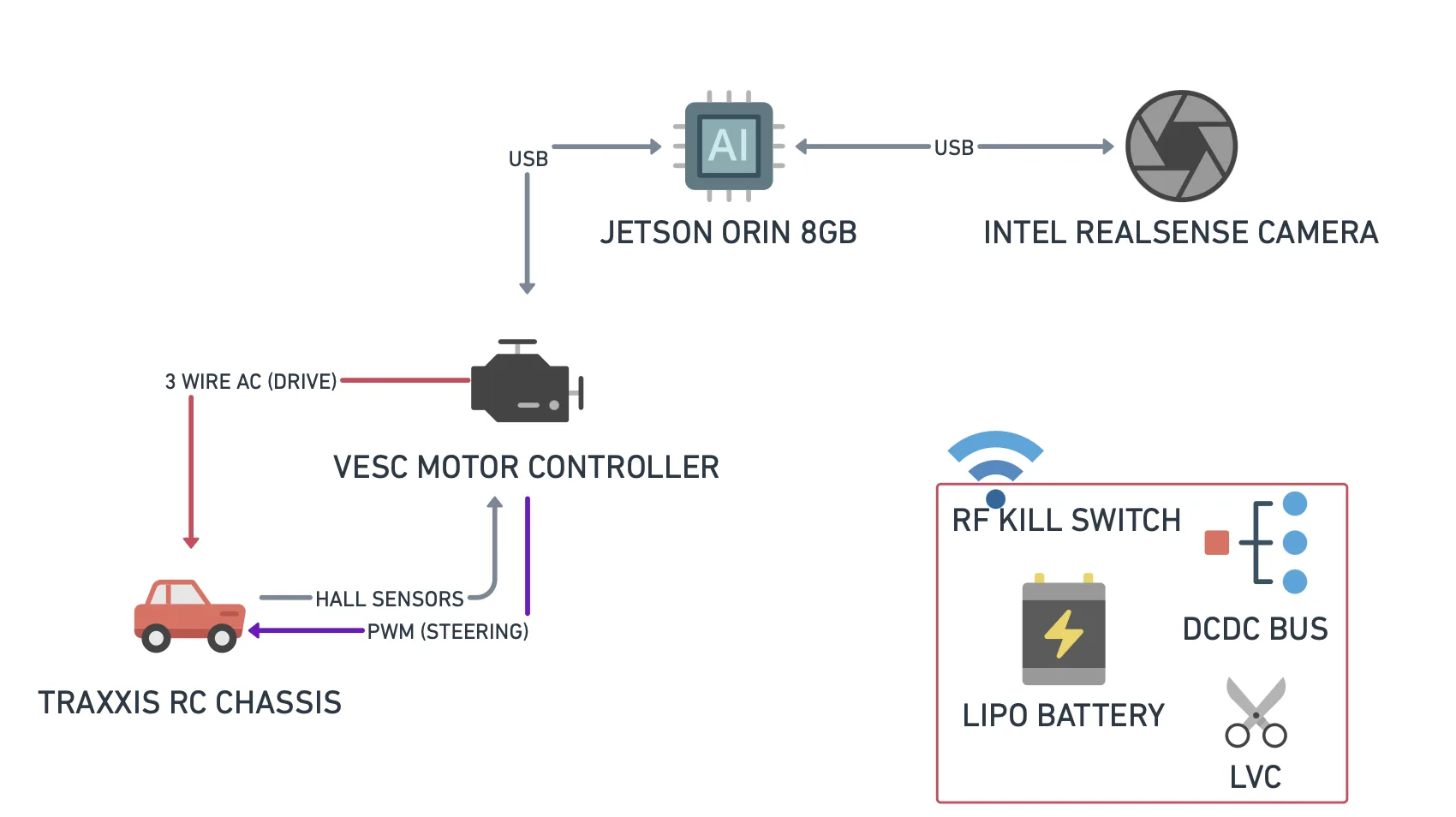
Built on a Traxxas Ford Fiesta ST Rally 1/10 AWD chassis, chosen for availability, price, and replaceable parts. Powered by a Jetson Orin Nano 8GB, paired with a VESC motor controller for smooth low-RPM control and IMU access.
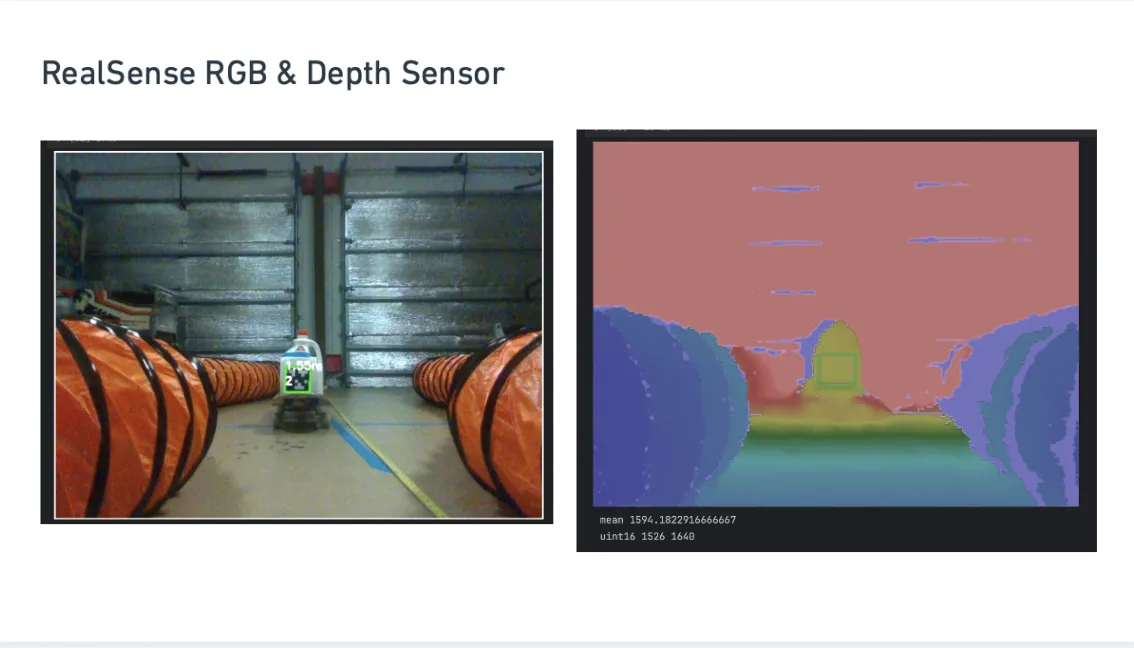
Vision & Sensing
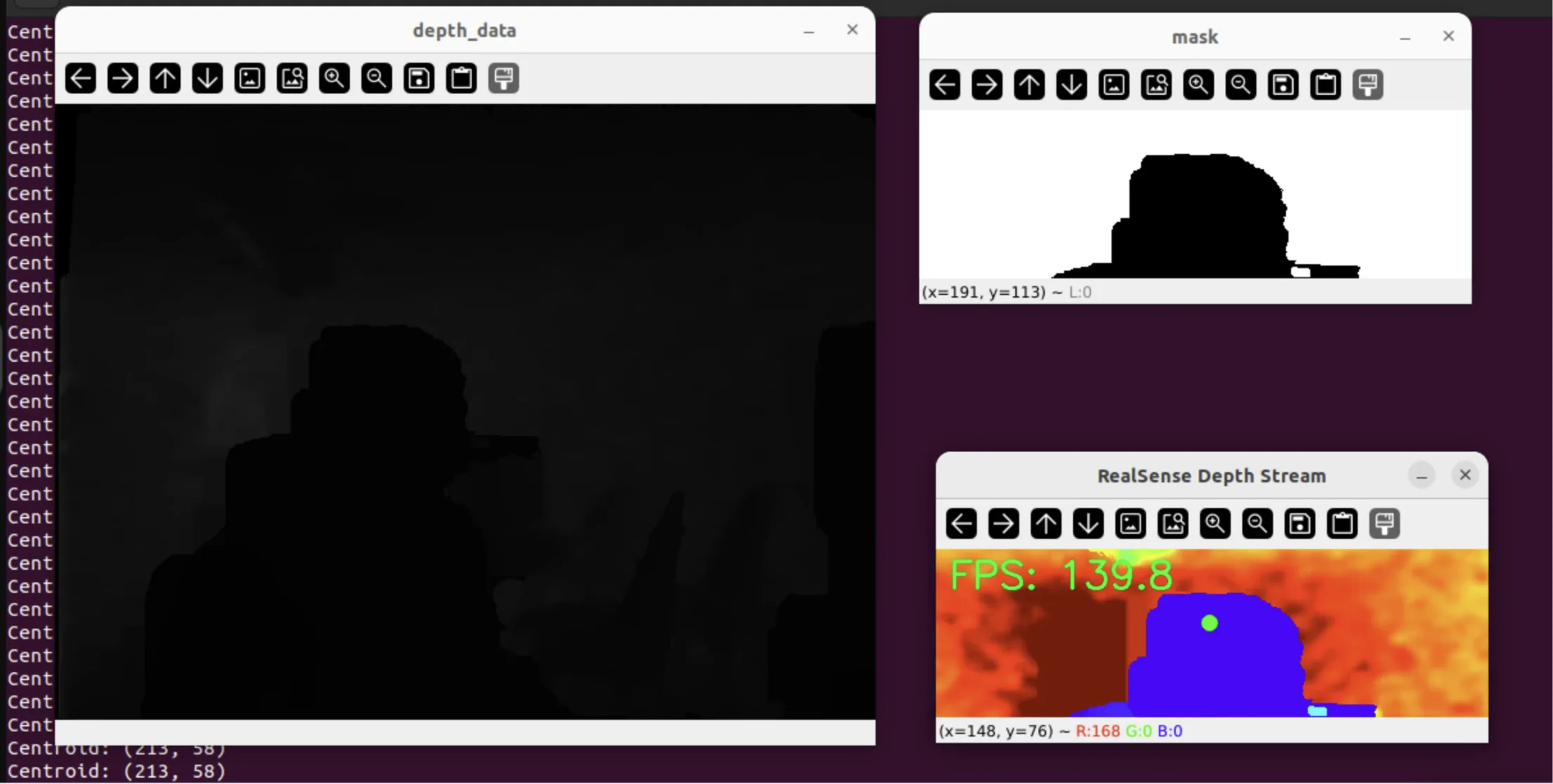
Primary vision comes from an Intel RealSense D435 providing RGB + depth data. The platform integrates real-world lessons learned about USB throughput limitations, camera FOV constraints, and sensor positioning for optimal performance.
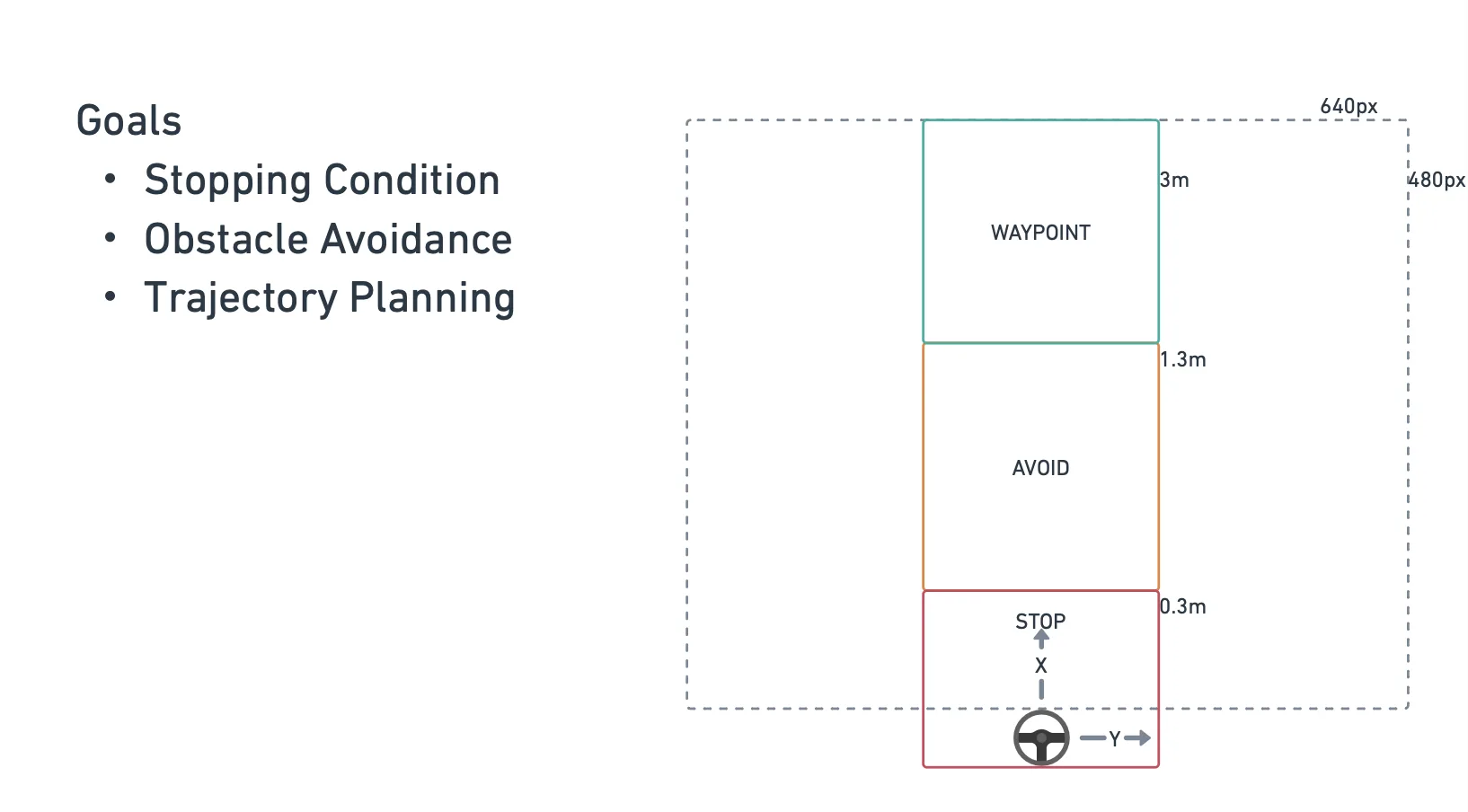
Sim2Real Approach
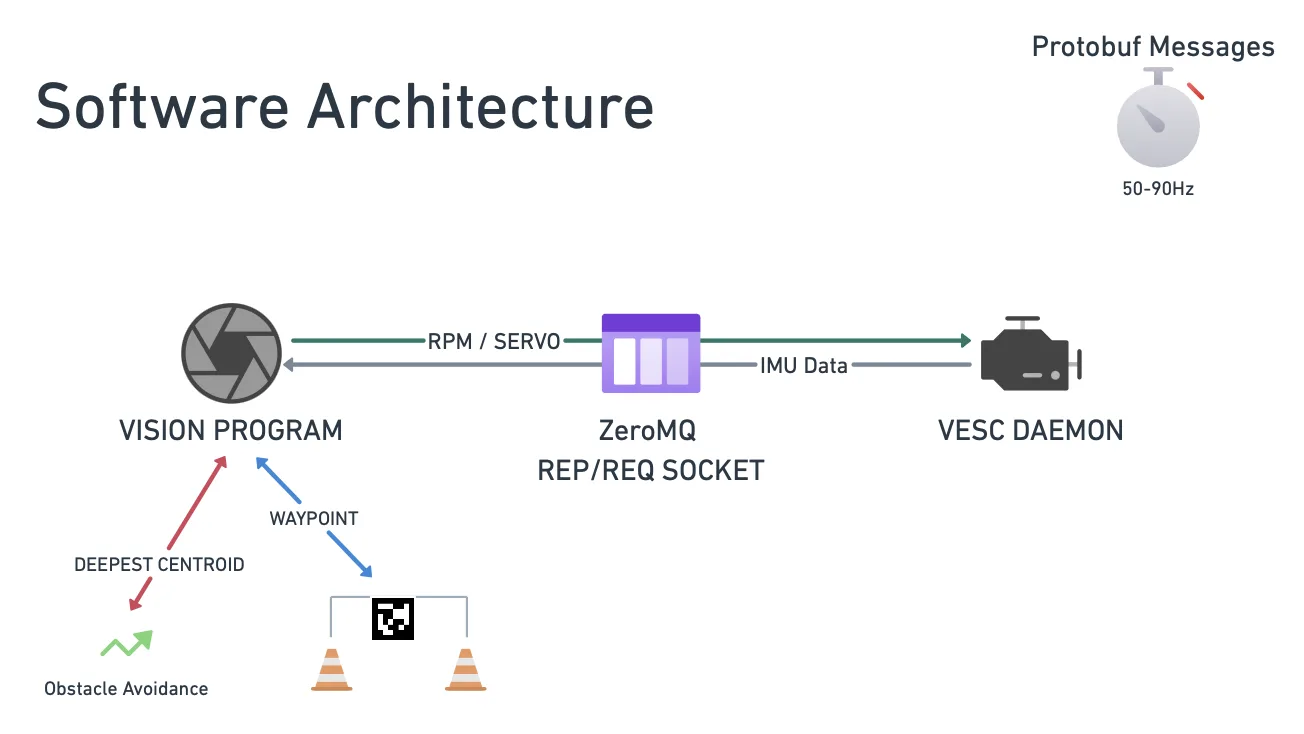
Training uses NVIDIA IsaacSim + IsaacLab with massively-parallel environments and PPO reinforcement learning for waypoint traversal policies. On-robot control uses a Python stack with lightweight messaging (ZeroMQ/Protobuf) instead of heavy ROS2 dependencies.
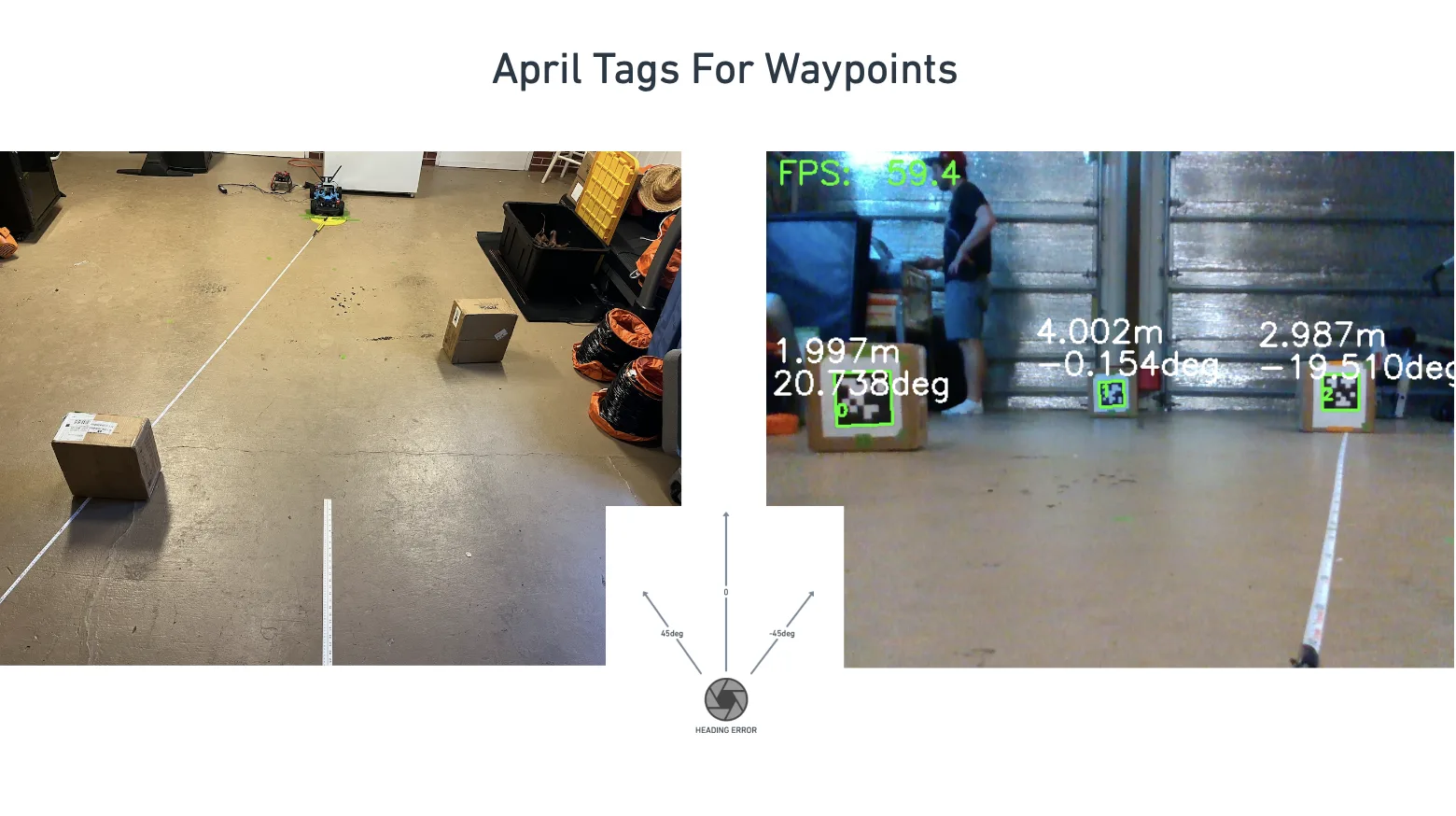
Proven Results
The team achieved successful real-world Sim2Real deployment with a trained policy completing autonomous runs through multiple waypoints. Digital twin accuracy proved critical—fixing a steering modeling error in simulation produced significantly more stable real-world behavior.
Future Development
Current work focuses on improving localization and mapping robustness, better camera characterization, adding richer observations, and enabling higher-speed autonomous driving with improved environmental understanding.